Camera Coordination
Published:
Extrinsic Matrix
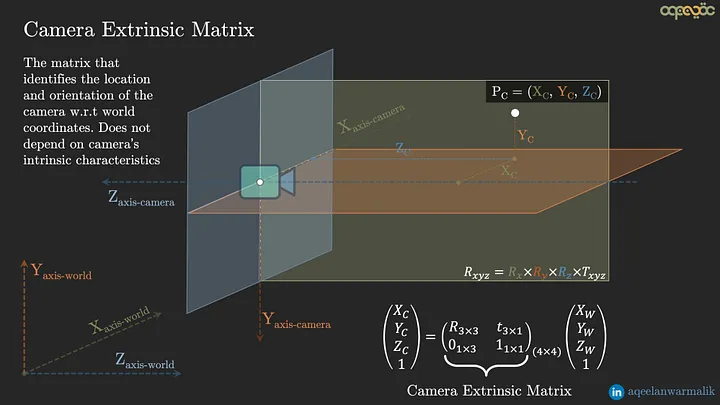
Extrinsic matrix is to change world coordination to camera coordination. Usually, R^T where R is the rotation degree of camera in world space.
Intrinsic Matrix
Image Coordinate System
Pinhole Model: Ray emitted from one point.
Project 3D points into camera image, which is a lossy transformation. The depth information is lost.
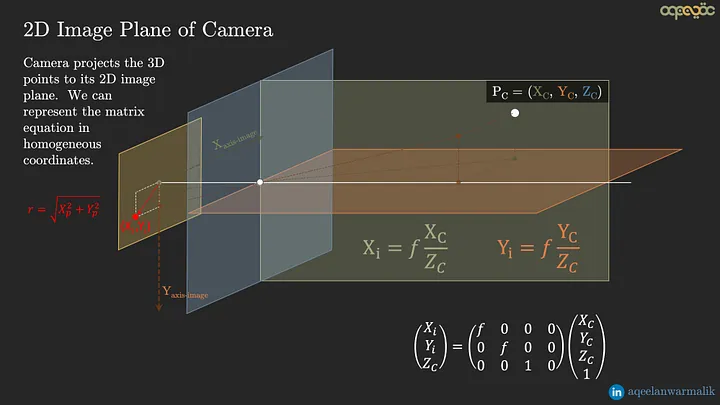
The 2D plane is at f (focal length) distance away from the camera.
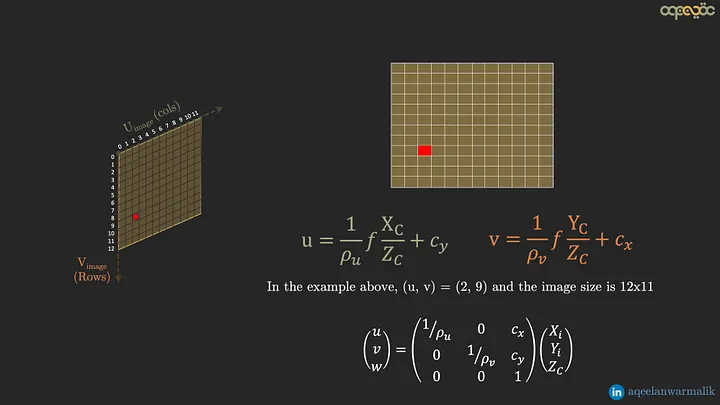
Pixel Coordinate System
First transform the ideal rectangular image to skewed image.
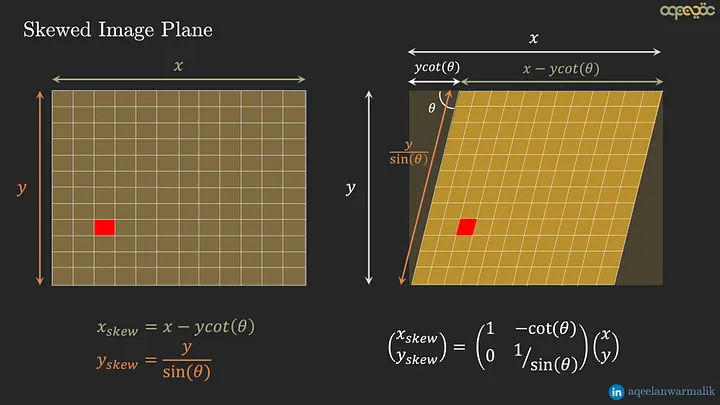
Then get to know the coordinates of each pixel by considering parameters (units: meter/pixel)
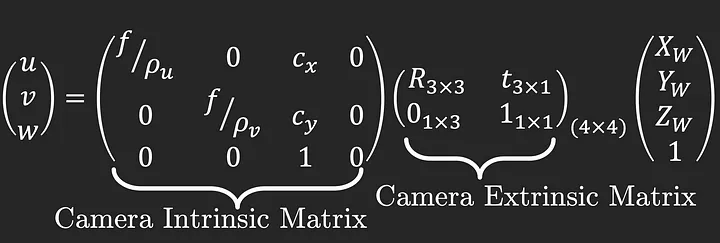
Combining
Combining the projection and meter2unit transformation matrix, we have the first matrix below.
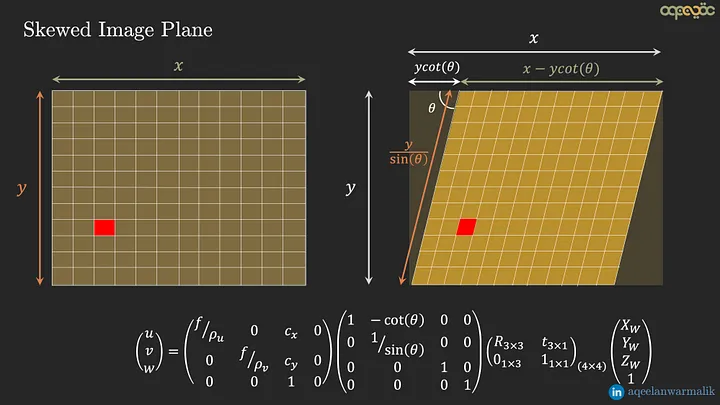
Combining the second matrix (rectangle2skewed), we get the intrinsic camera matrix.